






Inteligentní lineární motor s ovládáním síly je lineární motorový systém, který kombinuje technologii řízení síly a inteligentní algoritmy, schopné přesné nastavení výstupní síly (tah nebo napětí), dosažení vysoké dynamické odezvy, adaptivní nastavení a inteligentní řízení pohybu. Inteligentní lineární motor ovládaný silou se široce používá ve scénářích, které vyžadují přesné řízení síly nebo interaktivní provoz, jako jsou roboti, přesná výroba, lékařské vybavení atd.
|
Princip |
Na základě lineárního motoru a kombinované s technologií řízení síly inteligentní lineární motor regulace síly detekuje výstupní sílu v reálném čase prostřednictvím senzorů a přenáší signál zpětné vazby síly do regulátoru. Řadič porovnává hodnotu nastavené síly s hodnotou síly zpětné vazby, upravuje vstupní proud a další parametry a dosahuje přesné kontroly výstupní síly. TM - LM Lineární motorový modul z Tallman Robotics využívá algoritmus hybridního řízení síly, algoritmus konstantního regulace síly atd. K dosažení přesné kontroly síly. |
|
Strukturální charakteristiky |
Obvykle se skládá z lineárního těla motoru, snímače síly, ovladače atd. Lineární motor vytváří lineární hnací sílu pohybu; Měření výstupní síly v reálném čase senzory síly, obvykle včetně deformace měřidel, piezoelektrických senzorů atd.; Řadič je základní součástí odpovědné za signály zpětné vazby zpracování síly a vydávání kontrolních příkazů. Za účelem zlepšení výkonu a integrace některé inteligentní lineární motory řízené silou přijímají integrovaný návrh řízení pohonu, který integruje ovladač a ovladač, snižuje objem a zapojení a zlepšuje stabilitu a spolehlivost systému. |
|
Výhody výkonu |
1). Přesnost kontroly vysoká síla: Může dosáhnout vysoké přesnosti kontroly síly. Například po přidání funkce regulace přesnosti do inteligentního TM - LM lineárního motorového modulu může přesnost řízení tlakové síly dosáhnout ± 0,01N. Rychlá rychlost odezvy: Schopnost rychle reagovat na změny v síle, upravit výstupní sílu v reálném čase a přizpůsobit se požadavkům na kontrolu dynamické síly. V důsledku absence mechanismu přenosu se sníží mechanická setrvačnost a hystereze, což zvyšuje rychlost odezvy systému a citlivost. 2). Přesnost polohy: Kromě přesnosti vysoké kontroly síly je přesnost polohování také vynikající. Některé produkty mají opakovanou přesnost polohování ± 0,001 mm, která může splňovat požadavky na vysoké - přesné polohování a kontrolu síly. 3). Flexibilní režim řízení: Podporuje více režimů kontroly, jako je hybridní kontrola polohy síly, kontrola konstantní síly atd. Vhodné metody kontroly lze vybrat podle různých požadavků na aplikaci k dosažení přesného řízení síly a řízení polohy. |
Inteligentní lineární motor ovládaný silou používá senzory síly a inteligentní ovládání nejen k přesnému umístění lineárního motoru, ale také dosažení vysoko dynamických a adaptivních operací síly. Má významnou hodnotu ve vysoké výrobě -, lékařské robotiky, testování vědeckého výzkumu a dalších oborech. V budoucnu se s vývojem technologie AI a snímací technologie dále rozšiřuje.
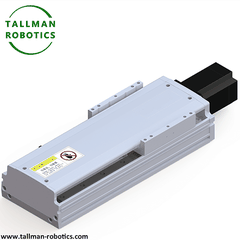
Zde představujeme lineární motor, model TML170-CR pro čisté prostředí s datovými listy:
Jste vítáni sledovat další projekty nebo navštívit naši video galerii na YouTube: https://www.youtube.com/@tallmanrobotics











Scémovaný inteligentní lineární motor s vysokým - přesným ovládáním síly, rychlou odezvou a flexibilními charakteristikami přizpůsobení, hraje klíčovou roli ve scénářích, které vyžadují přesnou kontrolu síly a polohy a jsou široce používány ve více oborech, jako je přesná výroba, elektronické polovodiče, lékařské zdraví a vědecké výzkumné experimenty. Následuje podrobné vysvětlení konkrétních aplikačních scénářů:
1. Výroba elektroniky a polovodičů
Elektronický průmysl má extrémně vysoké přesnosti požadavků na montáž a testování. Inteligentní lineární motory řízené silou se mohou vyhnout poškození součástí způsobené nadměrnou silou a zároveň zajistit konzistentní provoz.
|
Balení a testování čipů |
Během procesu vazby drátu je nutné přesně ovládat kontaktní sílu mezi pájecím drátem a čepy čipu (obvykle v rámci ± 0,1n), aby se zabránilo poškození čipu nebo špatnému kontaktu; Během testování čipů může kontrola kontaktní síly mezi sondou a pájecími spoji čipu zabránit rozpadu ohýbání nebo čipu. |
|
Sestava desky PCB |
Ovládejte sílu umístění malých komponent, jako jsou rezistory a kondenzátory během SMT a Plug - v procesech, aby se zabránilo oddělení komponent nebo poškození podložky; V procesu laminace flexibilních desek obvodu (FPC) se konstantní kontrola síly používá k zajištění rovnoměrné adheze a zabránění vrásek nebo prasklinám. |
|
Výroba obrazovky |
Během sestavy obrazovek LCD nebo OLED a modulů podsvícení ovládejte tlakovou sílu, aby se zabránilo rozbití skleněného substrátu; Během procesu vazby senzorů dotykové obrazovky se tlak upravuje pomocí zpětné vazby síly, aby se zajistila stabilní vodivost snímací vrstvy. |
2. Přesná sestava produktů 3C
Produkty 3C (mobilní telefony, počítače, inteligentní zařízení) mají malé a křehké komponenty a technologie řízení síly může zlepšit účinnost a výnos sestavení.
|
Sestava mobilního telefonu |
Stisknutí modulu kamery a krytu baterie vyžaduje řízení tlaku, aby se zabránilo deformaci pouzdra nebo poškození vnitřních komponent; Při sestavení slotů a tlačítek SIM karty se zpětná vazba Force používá k určení, zda jsou správně nainstalovány, vyhýbání se utažení nebo uvolnění. |
|
Vložení a odstranění konektoru |
Během procesu vložení a odstraňování rozhraní USB a konektorů pásu by měla být inzerce a odstraňovací síla přesně kontrolována (jako je vkládání a odstranění micro USB obvykle 5-30N), aby se zabránilo ohýbání nebo opotřebení rozhraní a aby se určila, zda je sestava kvalifikována pomocí křivek síly. |
|
Nositelná zařízení, jako jsou hodinky/sluchátka |
Sestava mikropudičů a baterií vyžaduje kontrolu síly Millinewtons (MN), aby se zabránilo deformaci přesných komponent; Při utažení spojovacích šroubů mezi hodinářským popruhem a pouzdrem hodinek se zpětná vazba síly používá k zabránění sklouznutí nebo rozbití. |
3. lékařské vybavení a bioinženýrství
Kontrola síly v oblasti lékařské oblasti přímo souvisí s provozní bezpečností a experimentální přesností a motory s kontrolovanými silami mohou dosáhnout minimálně invazivních a přesných pohybů.
|
Minimálně invazivní chirurgický robot |
V laparoskopické chirurgii, kdy se nástroje (jako jsou kleště, nůžky) přicházejí do styku s tkání, upínací síla (obvykle<1N) is adjusted in real time through force feedback to avoid damaging blood vessels or organs; During orthopedic surgery, pressure should be controlled to prevent bone fractures during bone drilling or screw implantation. |
|
Vývoj léčiv a biologické experimenty |
Při operaci mikrofluidních čipů kontrolujte injekční nebo extrakční sílu stopových kapalin (μl hladiny), aby se zabránilo ruptuře kanálu čipového kanálu; V buněčné kultuře vyžaduje uchopení a lisování buněk (jako jsou buněčné mechaniky asistované mikroskopií atomové síly) kontrolu nanonewtonů (NN) síly, aby se zabránilo buněčné smrti. |
|
Rehabilitační zařízení |
Tréninkový modul končetin rehabilitačního robota snímá stav síly pacienta prostřednictvím zpětné vazby síly, upravuje pomocnou sílu v reálném čase a zabraňuje poškození svalů způsobené nadměrnou trakcí. |
4. Testování přesnosti a kontrola kvality
V procesu testování produktu může motor řízený silou simulovat stav síly ve scénáři použití nebo posoudit výkon produktu prostřednictvím analýzy křivky síly.
|
Testování mechaniky materiálu |
Při provádění tahových a ohybových testů na materiálech, jako jsou kovové listy, plastové filmy a vlákna, jsou rychlost a velikost zatížení přesně kontrolována (jako je nepřetržitě nastavitelná od 0,1n do 100n), aby se získaly parametry, jako je výnosná síla a elastický modul materiálu. |
|
Test na tlačítko/přepínání života |
Simulujte sílu uživatelů stisknutí tlačítek telefonu, klávesnice a tlačítek automobilu (obvykle 1-5N) a určují trvanlivost produktu změnami hodnot síly během desítek tisíc cyklů testování. |
|
Testování výkonu těsnění |
Proveďte tlakové zkoušky na těsnicích kroužcích vodních šálků a tlakových nádob, kontrolujte mačkové síly a monitorujte změny v platnosti, abyste zjistili, zda dojde k úniku (abnormální snížení v platnosti může naznačovat selhání těsnění). |
5. Výzkum a speciální vybavení
Při řezání - Edge Research nebo Special Environments, Force řízené inteligentní lineární motory poskytují stabilní výstup síly pro experimenty s vysokým -.
|
Space Experimentální vybavení |
Přesná kontrola sil působících na experimentální vzorky (jako je růst krystalů a svařování materiálu) v pozemních simulacích kosmických lodí nebo prostředí mikrogravitací, což eliminuje gravitační rušení. |
|
Provozní platforma nano úrovně |
V mikroskopii skenovací sondy (SPM) a nanoindentační nástroje je kontaktní síla mezi sondou a povrchem vzorku řízena motorským motorem kontrolovaným silou (až do úrovně μ N nebo dokonce nn), což dosahuje morfologické morfologie atomové úrovně nebo testování tvrdosti materiálu. |
|
Provoz asistované roboty |
Při sestavování přesných nástrojů s konečným efektorem kolaborativního robota (jako je uchopení) je „kompatibilní kontrola“ dosažena zpětnou vazbou síly, aby se přizpůsobila malým polohovým odchylkám obrobku a zabránila rigidním kolizím. |
Základní hodnota inteligentních lineárních motorů řízených silou spočívá v přesné a koordinované kontrole síly a polohy. Jejich aplikační scénáře vyžadují rovnováhu mezi „velikostí síly“ a „provozní přesností“, zejména vhodný pro scénáře, které vyžadují „citlivost síly“, „náchylnost k poškození“ a „vysokou konzistencí“. S rozvojem průmyslové automatizace směrem k „flexibilitě“ a „inteligenci“ se jeho aplikační rozsah neustále rozšiřuje, jako jsou rozvíjející se pole, jako je svařování nových elektrod energetické baterie a stohování fotovoltaických modulů.
Populární Tagy: Inteligentní lineární motor ovládaný silou, China Force řízený inteligentní výrobci lineárních motorů, dodavatelé, továrna

