






Lineární krokový ovladač je otevřený - ovládací zařízení pro ovládání smyčky, které přímo spojuje krokový motor s lineárním přenosovým mechanismem a dosahuje diskrétního pohybu polohy prostřednictvím ovládání signálu Pulse. Lineární krokový ovladač je elektromechanické zařízení, které převádí signály elektrického pulsu na přesné lineární posun a kombinuje vlastnosti pulzního řízení krokového motoru s lineárním výkonem pohybu. Obecně se používá ve scénářích, které vyžadují přesné polohování, ale nevyžadují vysoko uzavřené - ovládání smyčky.
Hlavními rysy lineárního krokového ovladače jsou jednoduchá struktura, nízké náklady a umístění bez zpětné vazby, vhodné pro automatizační scénáře s nízkou až středně přesností a nízkým až středním zatížením, jako je 3D tisk, lékařské vybavení, automatizované obaly atd.
Thepracovní principzLineární krokový ovladač je založen na kroku - od - Step Rotation Charakteristiky krokových motorů:
Řadič odešle signály pulsu, aby řídil krokový motor, aby se otočil krok za krokem pod pevným úhlem (například 1,8 stupně /krok), a poté převádí rotační pohyb na lineární posun prostřednictvím přenosových mechanismů, jako jsou šrouby a ozubená kola. Pro každý vstupní impuls posouvá pohon pevnou vzdálenost kroku (obvykle v mikrometrech) a posun je úměrný počtu impulsů. Může dosáhnout otevřené - smyčka přesná kontrola bez senzorů zpětné vazby a má relativně jednoduchou strukturu.
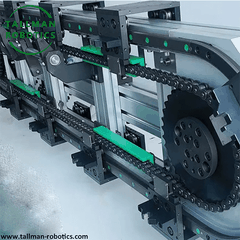
Strukturálně je lineární krokový ovladač složen hlavně ze tří částí:
hnací jednotka (krokový motor a hnací obvod), přenosová součást (kuličkový šroub nebo lichoběžník, odpovědný za přeměnu rotace na lineární pohyb) a hlavní systém (lineární ložiska nebo vodicí kolejnice, což zajišťuje hladký pohyb). Některé modely integrují limitní přepínače, aby se zabránilo provozu nadměrnému a zjednodušení návrhu systému.
Aplikace je zaměřena na scénáře polohy s nízkým až středním přesností:
nozzle feed for 3D printers, worktable drive for small CNC machine tools, sample transfer for laboratory automation equipment, dose control for medical devices (such as infusion pumps), lens focusing for security equipment, etc. Its advantages lie in its lower cost compared to servo systems, simple control, no need for complex closed-loop circuits, and no vibration during low-speed operation. Lineární krokový ovladač je vhodný pro přerušované scénáře pohybu s lehkým zatížením a vysokou opakovatelností. Přesnost kroku může obvykle dosáhnout ± 0,01 mm a splňuje potřeby většiny malých a středních automatizačních zařízení velikosti.
Zde představujeme postavenou průvodcovskou železnici - v lineárním modulu, TMTH8 vám následujícím způsobem:
Jste vítáni sledovat další projekty nebo navštívit naši video galerii na YouTube: https://www.youtube.com/@tallmanrobotics
|
Model Žádný |
Motor Síla (W) |
Šířka těla (MM) |
Opakovatelnost (MM) |
Kuličkový šroubový tyč (C7) |
Max Load (KGS) |
Mrtvice (mm) na Maximální rychlost (mm/s) |
Rychlost (mm/s) při maximálním tahu (mm) |
Hodnoceno Tah |
||
|
Out Dia (MM) |
Olovo (mm) |
Horizontální |
Vertikální |
|||||||
|
TMTH8 |
100W |
82 |
±0.01 ±0.005 |
16 |
5 |
30 |
10 |
750 mm při 250 mm/s |
75 mm/s při 1100 mm |
341 |
|
10 |
15 |
5 |
750 mm při 500 mm/s |
150 mm/s při 1100 mm |
170 |
|||||
|
20 |
10 |
2.5 |
750 mm při 1000 mm/s |
300 mm/s při 1100 mm |
85 |
|||||
|
200W |
5 |
50 |
15 |
750 mm při 250 mm/s |
75 mm/s při 1100 mm |
682 |
||||
|
10 |
30 |
8 |
750 mm při 500 mm/s |
150 mm/s při 1100 mm |
340 |
|||||
|
20 |
18 |
3 |
750 mm při 1000 mm/s |
300 mm/s při 1100 mm |
170 |
|||||
|
400W |
5 |
50 |
15 |
750 mm při 250 mm/s |
75 mm/s při 1100 mm |
1353 |
||||
|
10 |
40 |
12 |
750 mm při 500 mm/s |
150 mm/s při 1100 mm |
674 |
|||||
|
20 |
22 |
5 |
750 mm při 1000 mm/s |
300 mm/s při 1100 mm |
337 |
|||||









Existují významné rozdíly mezi ovladači lineárních krokových motorů a lineárními servomotorovými pohony, pokud jde o metody řízení, charakteristiky výkonu a příslušné scénáře. Specifické rozdíly jsou následující:
1. Různé kontrolní principy
Lineární krokový ovladač motoru: Přijměte Open - Ovládání smyčky, řídí motor, aby se otáčel (nebo se pohyboval v přímé linii) v pevné vzdálenosti s přijímáním pulzních signálů a posun přísně odpovídá počtu impulsů, aniž by bylo nutné, aby bylo nutné snímače zpětné vazby. Dokud je signál pulsu přesný, lze dosáhnout přednastaveného pohybu, ale nemůže cítit, zda se skutečná poloha odchyluje od instrukce.
Lineární pohon servomotoru: Přijímá uzavřené řízení smyčky -, integruje senzory polohy (jako je pravítko, kodér) a vrátí skutečnou polohu a rychlost ovladači v reálném čase. Řadič porovnává hodnotu příkazu s hodnotou zpětné vazby, dynamicky upravuje výstup, aby byla zajištěna přesnost pohybu, a může opravit odchylky způsobené změnami zátěže a mechanickými chybami.
2. různé schopnosti manipulace s přesností a chybami
Lineárního krokového ovladače: přesnost závisí na konzistenci úhlu kroku (nebo lineárního kroku) bez možnosti korekce chyb. Pokud je zatížení příliš velké a frekvence pulsů je příliš vysoká, může dojít k ztrátě kroku (skutečný posun je menší než velený posun) a chyby se hromadí. Přesnost kroku je obvykle ± 0,01 mm 0,1 mm.
Lineární pohon servomotoru: Korekce chyb v reálném čase přes uzavřenou - zpětná vazba smyčky, silná anti - interferenční schopnost, vyšší přesnost opakovatelnosti (až ± 0,001 mm 0,01 mm), i když dochází k kolísání zátěže nebo vnější interference, může být obnovena do velící pozice bez kumulativní chyby.
3. různá rychlost a dynamická odezva
Lineární krokový ovladač motoru: Stabilní nízká - Výkon rychlosti, ale náchylný k vibracím a ztrátě kroku během vysoké rychlosti a výstupního momentu se snižuje s rostoucí rychlostí (existuje riziko „ztráty kroku“), vhodný pro nízkou - rychlostní scény.
Lineární servomotor Motor Actuator: S rychlou vysokou rychlostní odezvou a zavřený {- ovládání smyčky může udržovat stabilní výstup v široké rychlosti. Procesy zrychlení a zpomalení jsou plynulejší, takže je vhodné pro scénáře, které vyžadují rychlé zastavení nebo kontinuální vysokou rychlostní pohyb.
4. Různé charakteristiky nakládky a točivého momentu
Lineárního krokového motorického pohonu: Výstupní točivý moment (nebo tah) klesá se zvyšující se rychlostí. Při nízkých rychlostech je točivý moment větší, ale při vysokých rychlostech je náchylný k přetížení při těžkých zatíženích. Je vhodný pro světelné zatížení (obvykle méně než 500 N) a scénáře nízké setrvačnosti.
Lineární pohon servomotoru: přes uzavřený - ovládání smyčky lze výstupní sílu upravit podle změn zatížení. Má silnější vysokou - rychlost a těžký - schopnosti a dokáže udržovat stabilní tah při vysokých rychlostech. Je vhodný pro scénáře se středním až vysokým zatížením (až tisíce Newtonů) a vysokou setrvačností.
5. Různé náklady a složitost
Lineární krokový pohon motoru: Jednoduchá struktura, není potřeba senzorů zpětné vazby, zjednodušený řídicí obvod, nízké náklady (obvykle 1/3 ~ 1/2 servopozice), nízké potíže s laděním, vhodné pro malé a střední zařízení s omezeným rozpočtem.
Lineární pohon servomotoru: Vyžaduje integraci senzorů a komplexních uzavřených algoritmů smyčky-, což je nákladné, a ladění řadiče (jako je ladění parametrů) je složitější, což je vhodné pro přesné zařízení s vysokým výkonem.
6. Různé platné scénáře
Lineární krokový ovladač motoru: Vhodný pro nízkou přesnost, lehké zatížení, nízké - Rychlost opakující se scénáře pohybu, jako je například krmivo 3D tiskárny, malé přepravy, polohování vzorku laboratorního vzorku, ovládání domácího zařízení, atd.
Lineární servomotor Motor Actator: Vhodný pro vysokou - Precision, vysoké zatížení, vysoké - Scénáře dynamické odezvy rychlosti, jako je polovodičová manipulace s laserovým řezím, přesné roboty sestavy, lékařské chirurgické vybavení atd.
Shrnutí a srovnávací tabulka
|
Srovnávací dimenze |
Lineární ovladač motoru |
Lineární servomotorový ovladač |
|
Režim řízení |
Otevřená smyčka (žádná zpětná vazba) |
Uzavřená smyčka (s polohou/rychlostí zpětné vazby) |
|
Přesnost |
Střední (± 0,01 mm 0,1 mm), žádná korekce |
Vysoká přesnost (± 0,001 mm 0,01 mm), opravitelné |
|
Rychlost a reakce |
Stabilní při nízkých rychlostech, snadno ztratí kroky při vysokých rychlostech |
Rychlá reakce při vysokých rychlostech, hladký provoz |
|
Nakládací kapacita |
Světlé zatížení, snížené vysoké - točivý moment |
Střední vysoké zatížení, stabilní vysoký - točivý moment |
|
Náklady |
Nízký |
Vysoký |
|
Základní výhody |
Jednoduché ovládání, nízké náklady, nízká - Rychlost vibrace zdarma |
Vysoká přesnost, silná anti - Interference, dobrý vysoký - Speed Performance |
Při výběru je nutné učinit komplexní úsudek na základě požadavků aplikace na přesnost, rychlost, zatížení a rozpočet na náklady: Pro lehké a jednoduché scénáře je preferováno krok, zatímco pro vysokou - přesnost a vysoce dynamické scénáře je vyžadováno servo.
Populární Tagy: Lineární krokového ovladače, Čína lineární výrobci ovladače krokového kroku, dodavatelé, továrna



