





Jednotka pro ovládání robotického pásu je zařízení pro přenos pásu navrženého speciálně pro robotické klouby nebo končetiny. Dosahuje přesné a lehké kontroly pohybu flexibilním přenosem synchronních pásů, vyvážení přenosu energie a strukturální flexibilitou. Jednotka pro ovládání robotického pásu se široce používá v polích, jako jsou kolaborativní roboti a biomimetické roboty, které jsou citlivé na hmotnost a rychlost odezvy.
Jednotka pro ovládání robotického pásu je modulární přenosové zařízení navržené speciálně pro robotické klouby nebo lineární pohyb, které dosahuje přenosu výkonu a řízení pohybu pomocí vysokého - Precision Synchronous Belt Transmission. Její základní rysy jsou lehké (o 40% lehčí než redukce ozubeného kola), dolní vůle (<1 arc minute), and high response (bandwidth>100Hz), široce používané ve spolupráci robotů, roboti Scara, delta roboti a dalších scénářích, které vyžadují vysoký dynamický výkon.
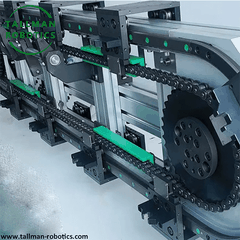
Thepracovní principzJednotka pro ovládání robotického pásuje založen na flexibilním přenosu meshingu:
Rotační výstup motoru je přenášen do synchronního pásu prostřednictvím aktivní kladky a pás poháněl poháněnou řemenicí skrz ozubené síťování, přenášející napájení na robotické klouby nebo konec provádění; Použitím flexibilních charakteristik pásu lze dosáhnout koaxiálního přenosu nebo vícepojovacího spojení. Současně lze nastavit úhel pohybu, rychlost a síla končetin robotů, a to ovládáním rychlosti a řízení motoru. Některé jednotky jsou integrovány do senzorů točivého momentu k dosažení kontroly zpětné vazby síly.
Strukturálně,Jednotka pro ovládání robotického pásuobvykle se skládá ze tří základních částí:
pohonný modul (micro servo motor a reduktor, poskytující výkon přizpůsobený robotu); Přenosové komponenty (vysoká - Precision Synchrons Belts, kladky a napínací mechanismy, přičemž pásy jsou většinou vyrobeny z vysoké - síly polyurethanového materiálu a zabudovány vrstvami zesílení vláken); Spojení a vodící komponenty (ložiska kloubů, omezovací struktury, zajištění stabilního směru přenosu, přizpůsobení se pohybové trajektorii robotických končetin) Celkový design zdůrazňuje lehkou, často používající slitinu hliníku nebo uhlíkových vláken ke snížení zatížení robota.
Zde představujeme standardní pohonu řízené pásem EU, TMEB65, s daty pro vás následujícím způsobem:
Jste vítáni sledovat další projekty nebo navštívit naši video galerii na YouTube: https://www.youtube.com/@tallmanrobotics
|
Model Žádný |
Motor Síla (W) |
Tělo Šířka (MM) |
Opakovatelnost (MM) |
Specifikace rozvodového pásu |
Max Load (KGS) |
Max tah (mm) na Maximální rychlost (mm/s) |
Hodnocený tah |
Lineární vodicí kolejnice |
|||
|
Šířka (mm) |
Zpomalení příděly |
Olovo (mm) |
Horizontální |
Vertikální |
|||||||
|
TMEB65-CR |
200W |
65 |
±0.1 |
32 |
3:1 |
50 |
4 |
2 |
5500 mm při 2500 mm/s |
59 |
15×12.5-1 |
|
5:1 |
30 |
12 |
5 |
5500 mm při 1500 mm/s |
99 |
||||||
|
7:1 |
21.43 |
25 |
9 |
5500 mm při 1071,5 mm/s |
139 |
||||||
|
10:1 |
15 |
50 |
14 |
5500 mm při 750 mm/s |
199 |
||||||
|
400W |
3:1 |
50 |
12 |
7 |
5500 mm při 2500 mm/s |
159 |
|||||
|
5:1 |
30 |
34 |
15 |
5500 mm při 1500 mm/s |
265 |
||||||
|
7:1 |
21.43 |
65 |
24 |
5500 mm při 1071,5 mm/s |
372 |
||||||
|
10:1 |
15 |
65 |
38 |
5500 mm při 750 mm/s |
531 |
||||||
|
750W |
3:1 |
50 |
23 |
13 |
5500 mm při 2500 mm/s |
300 |
|||||
|
5:1 |
30 |
65 |
28 |
5500 mm při 1500 mm/s |
500 |
||||||
|
7:1 |
21.43 |
65 |
45 |
5500 mm při 1071,5 mm/s |
700 |
||||||
|
10:1 |
15 |
65 |
65 |
5500 mm při 750 mm/s |
1000 |
||||||
|
10:1 |
20 |
76 |
26 |
5500 mm při 1000 mm/s |
398 |
||||||
|
750W |
3:1 |
66.66 |
13 |
8 |
5500 mm při 3333 mm/s |
225 |
|||||
|
5:1 |
40 |
36 |
18 |
5500 mm při 2000 mm/s |
375 |
||||||
|
7:1 |
28.5 |
71 |
30 |
5500 mm při 1425 mm/s |
525 |
||||||
|
10:1 |
20 |
80 |
50 |
5500 mm při 1000 mm/s |
750 |
||||||









Scénář aplikacezJednotka pro ovládání robotického pásuZaměřuje se na flexibilní kontrolu pohybu robotů:
ARM kloubní pohon kolaborativních robotů k dosažení flexibilního uchopení a montáže; Klouby nohou nebo prstů bionických robotů (jako jsou robotické zbraně a čtyřnásobné roboty) simulují přirozené pohyby končetin; Pomocný pohybový mechanismus lékařských rehabilitačních robotů poskytuje hladkou a kontrolovatelnou hnací sílu; Společný modul pro vzdělávací roboty, zjednodušení komplexního programování pohybu. Jeho základní výhody spočívají v nízkém hluku přenosu, rychlé rychlosti odezvy (zpoždění menší nebo rovné 10 ms), kompaktní struktuře a schopnosti dosáhnout více stupně pohybu svobody v omezeném prostoru. Náklady na údržbu jsou nižší než náklady na přenos převodovky, takže je vhodné pro scénáře s vysokými požadavky na flexibilitu a lidskou interakci stroje.
Jednotka pro ovládání robotického pásu dokonale vyrovnává požadavky přesnosti a bezpečnosti pohybu prostřednictvím konceptu návrhu „kombinace rigidity a flexibility“ a její modulární vlastnosti výrazně snižují prahovou hodnotu pro vývoj robotů. S rozšířením scénářů integrace strojů na stroji se tato technologie stane hlavní volbou pro lehké robotické klouby.
Populární Tagy: Jednotka pro ovládání robotického pásu, Čínská jednotka pro ovládání robotických pásů, dodavatelé, továrna


