






Modul teleskopického manipulátoru je speciálně navržený mechanismus lineárního pohybu, jehož základní vlastností je použití vnořené struktury k dosažení vysouvacího zdvihu daleko za jeho vlastní základní délku. Tento jedinečný design mu umožňuje dosahovat široké škály operací na omezeném prostoru a je široce používán v logistických skladech, výrobních montážích, speciálních operacích a dalších situacích, které vyžadují velký-přístup nebo provoz.
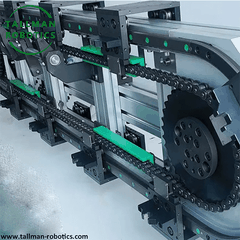
Modul teleskopického manipulátoru využívá více{0}}vrstevnou vnořenou strukturu, která obvykle zahrnuje více-úrovňové pohybové jednotky, jako je pevná základna, střední posuvná kolejnice a vrstva koncového efektoru. Různé úrovně jsou navzájem propojeny přesným systémem vodicích kolejnic a sekvenčního roztahování a smršťování konstrukcí se dosahuje pomocí přenosových metod, jako jsou synchronní řemeny, kuličkové šrouby nebo řetězy. Tato konstrukční koncepce umožňuje zachovat kompaktní strukturu při plném stažení a zároveň dosáhnout efektivního pracovního rozsahu několikanásobku délky základny při plném vysunutí.
Základní technické vlastnosti modulu teleskopického manipulátoru se odrážejí ve třech aspektech: za prvé, jeho vynikající využití prostoru, které dosahuje jedinečné výhody „malý objem, velký zdvih“ prostřednictvím více{0}}vrstevného vnořeného designu ve vertikálním nebo horizontálním směru; Za druhé, optimalizační alokace únosnosti zajišťuje dostatečnou tuhost a stabilitu i v plně roztaženém stavu prostřednictvím rozumného konstrukčního návrhu a výpočtu momentové rovnováhy; A konečně, přesné řízení pohybu je dosaženo použitím servopohonu a přesných převodových systémů pro dosažení synchronní koordinace a přesného polohování různých úrovní pohybu.
Pokud jde o způsoby přenosu, modul teleskopického manipulátoru používá především dvě schémata: synchronní řemenový převod a přenos kuličkovým šroubem. Schéma synchronního řemenového převodu je vhodnější pro aplikace s lehkým zatížením a vysokými rychlostmi, jako je logistické třídění, manipulace s lehkým materiálem atd.; Schéma přenosu kuličkovým šroubem je vhodné pro situace, které vyžadují větší nosnost a vyšší přesnost polohování, jako je manipulace s těžkým materiálem, precizní montáž atd.
Zde vám představujeme modul teleskopického manipulátoru, TMTH5 s datovým listem takto:
Můžete se podívat na další projekty nebo navštívit naši videogalerii na Youtube: https://www.youtube.com/@tallmanrobotics
|
Model Žádný |
Motor Výkon (W) |
Šířka těla (mm) |
Opakovatelnost (mm) |
Tyč s kulovým šroubem (C7) |
Maximální zatížení (kg) |
Zdvih (mm) při Maximální rychlost (mm/s) |
Rychlost (mm/s) při maximálním zdvihu (mm) |
Ohodnoceno Tah |
||
|
vnější průměr (mm) |
olovo (mm) |
Horizontální |
Vertikální |
|||||||
|
TMTH5 |
100W |
54 |
±0.01 ±0.005 |
12 |
2 |
23 |
10 |
600 mm při 100 mm/S |
60 mm/S při 800 mm |
854 |
|
5 |
30 |
10 |
600 mm při 250 mm/S |
150 mm/S při 800 mm |
341 |
|||||
|
10 |
15 |
5 |
600 mm při 500 mm/S |
300 mm/S při 800 mm |
170 |
|||||
|
20 |
10 |
2.5 |
600 mm při 1000 mm/S |
600 mm/S při 800 mm |
85 |
|||||
|
200W |
2 |
30 |
10 |
600 mm při 100 mm/S |
60 mm/S při 800 mm |
170 |
||||
|
5 |
30 |
10 |
600 mm při 250 mm/S |
150 mm/S při 800 mm |
682 |
|||||
|
10 |
28 |
8 |
600 mm při 500 mm/S |
300 mm/S při 800 mm |
340 |
|||||
|
20 |
15 |
5 |
600 mm při 1000 mm/S |
600 mm/S při 800 mm |
170 |
|||||
|
400W |
2 |
30 |
10 |
600 mm při 100 mm/S |
60 mm/S při 800 mm |
3389 |
||||
|
5 |
30 |
10 |
600 mm při 250 mm/S |
150 mm/S při 800 mm |
1353 |
|||||
|
10 |
30 |
10 |
600 mm při 500 mm/S |
300 mm/S při 800 mm |
674 |
|||||
|
20 |
22 |
8 |
600 mm při 1000 mm/S |
600 mm/S při 800 mm |
337 |
|||||
|
10 |
110 |
33 |
800 mm při 500 mm/S |
233 mm/S při 1250 mm |
1050 |
|||||
|
20 |
60 |
16 |
800 mm při 1000 mm/S |
467 mm/S při 1250 mm |
528 |
|||||
|
32 |
50 |
10 |
800 mm při 1600 mm/S |
747 mm/S při 1250 mm |
380 |
|||||









Aplikační výhody modulu teleskopického manipulátoru jsou významné: za prvé výrazně šetří prostor pro instalaci zařízení. Při stejných požadavcích na provozní rozsah je požadovaný instalační prostor snížen o více než 50 % ve srovnání s tradičními lineárními moduly; Za druhé, zlepšuje flexibilitu pracovního rozsahu zařízení a může se přizpůsobit různým složitým pracovním prostředím; Za třetí, modulární konstrukce snížila náklady na údržbu a zlepšila spolehlivost zařízení.
V současné době je modul teleskopického manipulátoru široce používán v mnoha oblastech. V odvětví logistiky a skladování se používá k automatizovanému skladování a třídění zboží v trojrozměrných skladech a také k přesunu materiálu v třídicích systémech; Ve zpracovatelském průmyslu se uplatňuje při montáži polohování velkých obrobků a materiálovém zásobování výrobních linek; Ve speciálních průmyslových odvětvích se používá pro vzdálené operace v nebezpečných prostředích a údržbářské operace ve stísněných prostorách.
S rozvojem inteligentní automatizace výroby a logistiky se modul teleskopického manipulátoru posouvá směrem k vyššímu zatížení, vyšší přesnosti a vyšší inteligenci. Nová generace inteligentních teleskopických manipulátorů integrujících systémy vizuálního rozpoznávání, technologii snímání síly a inteligentní řídicí algoritmy se stává vývojovým trendem, který poskytuje efektivnější a flexibilnější řešení prostorového provozu pro různá průmyslová odvětví.
Modul teleskopického manipulátoru hraje nezastupitelnou roli v moderních výrobních a logistických systémech díky své unikátní více{0}}vrstvě vnořené struktury a vynikající schopnosti prostorového rozšíření. Řeší nejen rozpor mezi omezeným prostorem a požadavky na velko{2}}provoz, ale také poskytuje inovativní řešení pro optimalizaci prostorového uspořádání automatizačních zařízení a je důležitou součástí moderních inteligentních zařízení.
Populární Tagy: modul teleskopického manipulátoru, Čína výrobci modulu teleskopického manipulátoru, dodavatelé, továrna


